燃煤电厂堆取料机无人值守系统
系统介绍:燃煤电厂堆取料机无人值守系统是利用激光扫描系统对料场进行三维数据成像,结合室内精确定位系统(UWB定位)、流量监控系统、防撞安全系统、视频监控系统与自动控制实现对斗轮机的全自动作业,达到料场堆取料机无人值守。
实现目标:
A.减少斗轮机的操作人员,降低劳动成本,改善工作环境。
B.提高斗轮机的生产效率与安全运行的稳定性。
C.提高堆取料作业的精准度。
D.提高电厂的经济效益和核心竞争力,实现斗轮机对料场转运的无人化、智能化控制。
软件示例:
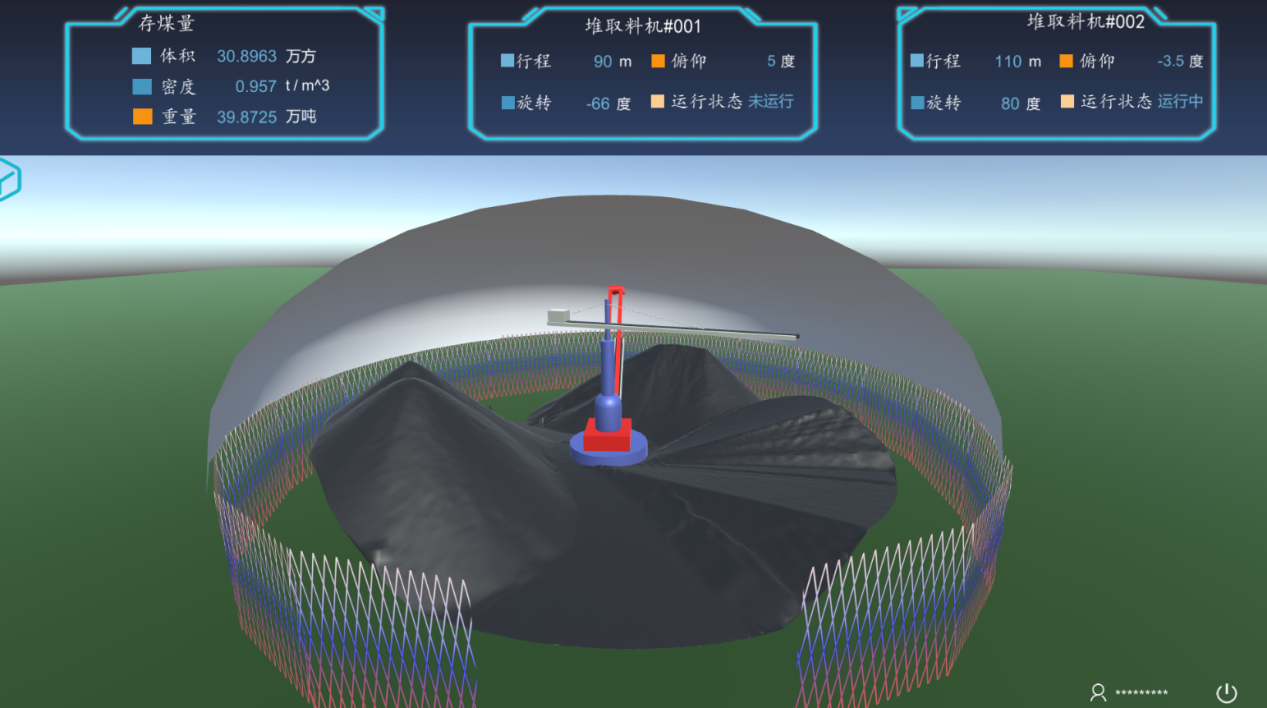


燃煤电厂堆取料机无人值守系统
系统介绍:燃煤电厂堆取料机无人值守系统是利用激光扫描系统对料场进行三维数据成像,结合室内精确定位系统(UWB定位)、流量监控系统、防撞安全系统、视频监控系统与自动控制实现对斗轮机的全自动作业,达到料场堆取料机无人值守。
实现目标:
A.减少斗轮机的操作人员,降低劳动成本,改善工作环境。
B.提高斗轮机的生产效率与安全运行的稳定性。
C.提高堆取料作业的精准度。
D.提高电厂的经济效益和核心竞争力,实现斗轮机对料场转运的无人化、智能化控制。
软件示例:



 京公网安备-申请中
京公网安备-申请中
